Control of an Inverted Pendulum
Application ID: 74281
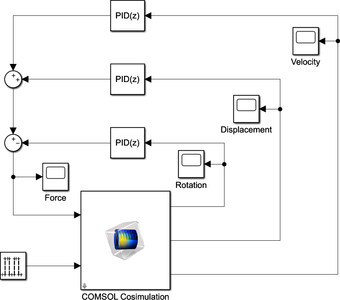
This model shows how to control the position of the base of an inverted pendulum to keep it vertical.
The control is performed using a PID controller in Simulink®. The position of the base is constrained within specified limits, and an external force is applied at the base to keep it vertical.
This model example illustrates applications of this type that would nominally be built using the following products:
however, additional products may be required to completely define and model it. Furthermore, this example may also be defined and modeled using components from the following product combinations:
- COMSOL Multiphysics® and
- LiveLink™ for Simulink® and
- either the MEMS Module, Multibody Dynamics Module, or Structural Mechanics Module
The combination of COMSOL® products required to model your application depends on several factors and may include boundary conditions, material properties, physics interfaces, and part libraries. Particular functionality may be common to several products. To determine the right combination of products for your modeling needs, review the Specification Chart and make use of a free evaluation license. The COMSOL Sales and Support teams are available for answering any questions you may have regarding this.