Multibody Dynamics
New App: Truck Mounted Crane Analyzer
A new application has been added for computing the payload capacity of a truck-mounted crane for given crane positions and capacities of the hydraulic cylinders.
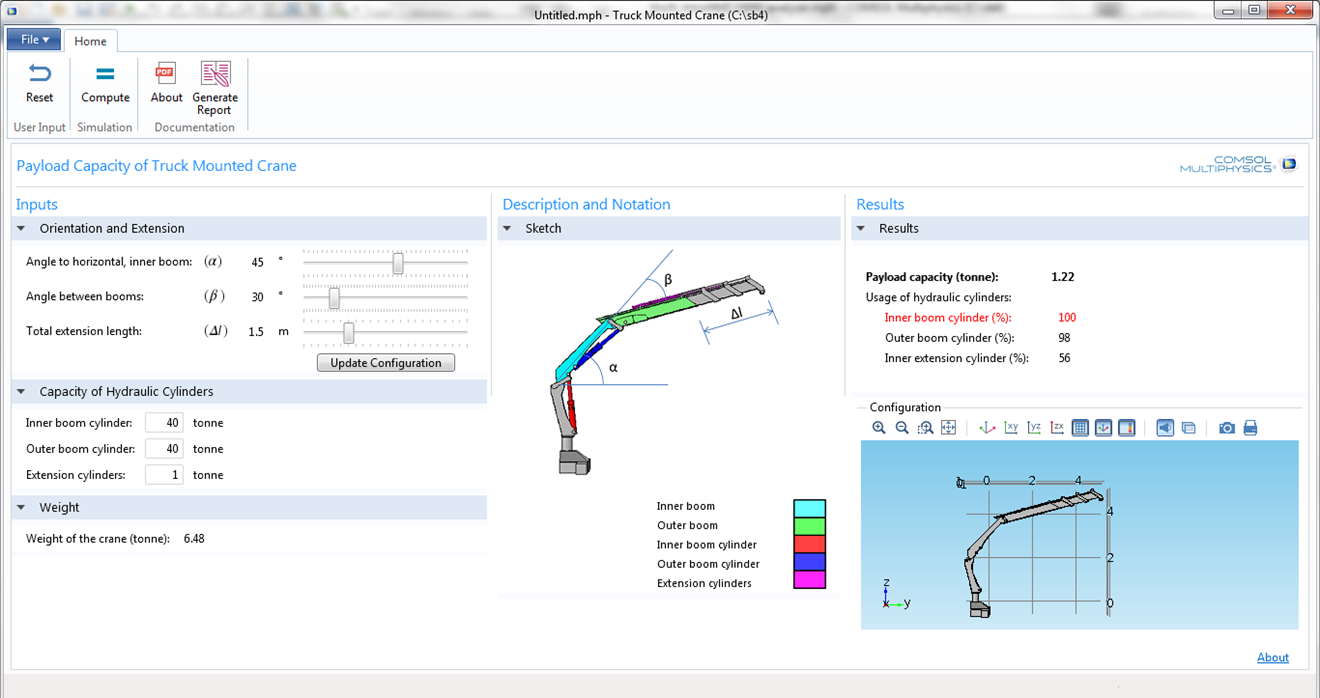 An app of a truck-mounted crane for analyzing payload capacity according to a defined crane position and hydraulic cylinder capacities.
An app of a truck-mounted crane for analyzing payload capacity according to a defined crane position and hydraulic cylinder capacities.
An app of a truck-mounted crane for analyzing payload capacity according to a defined crane position and hydraulic cylinder capacities.
Applied Force/Moment on Joint DOF
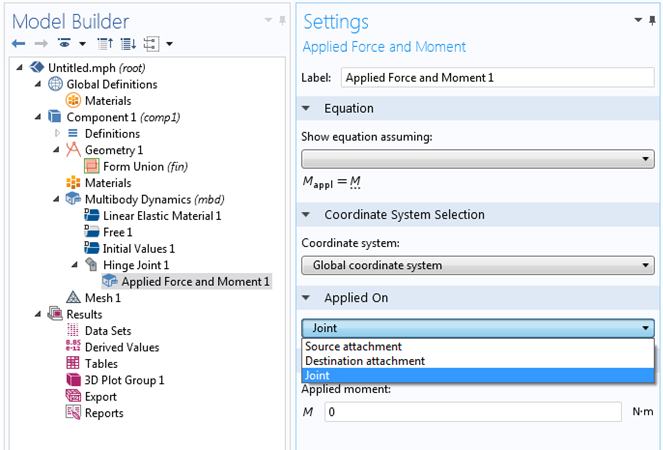
It is now possible to apply a load directly on the degree of freedom of a joint. As an example, when using a prismatic joint to model a hydraulic cylinder, the cylinder force can be prescribed. The change appears in the Applied Force and Moment subnode of a joint, where it is now possible to also select Joint in the Applied on section.
{kind=link}
Attachment Filter on Joints
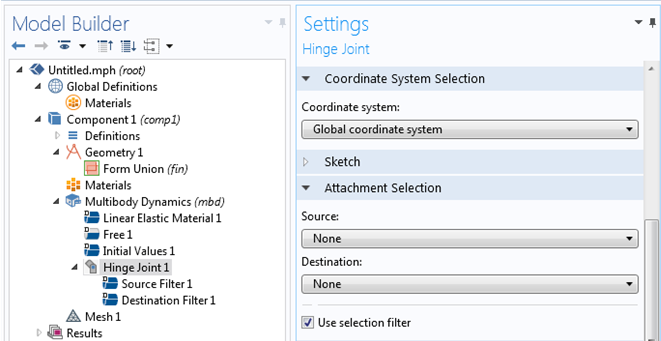
In a large multibody dynamics model, the selection lists for Source and Destination in the Attachment selection section for a joint can become very long. It is now possible to filter these lists using a selection of objects. When the new Use selection filter checkbox is selected, two new subnodes (Source Filter and Destination Filter) will appear under the joint node. It is then possible to select domains so that only attachments or rigid domains present on the selected domains will appear in the Source and Destination lists in the Attachment selection section.
{kind=link}
Roller Condition in the Multibody Dynamics Interface
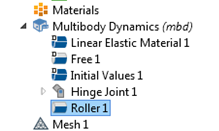
It is now possible to use a Roller boundary condition in the Multibody Dynamics physics interface. This condition can be used to model a set of sliding boundaries or a symmetry condition.
{kind=link}
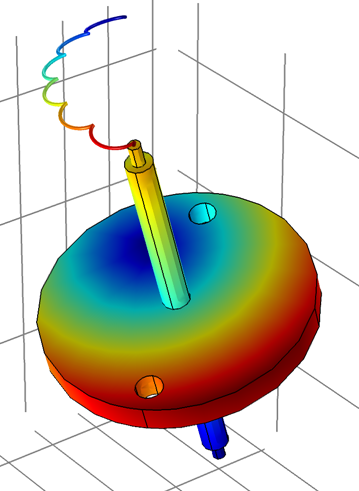
Point Trajectory Plot in Multibody Dynamics Models
It is now possible to plot the trajectory of geometric points or cut-points of a moving body using the Point Trajectories option in the 3D Plot Group and 2D Plot Group subnodes. This new plot is used in a number of existing Multibody Dynamics Module Application Library examples.
{kind=link}
{kind=link}
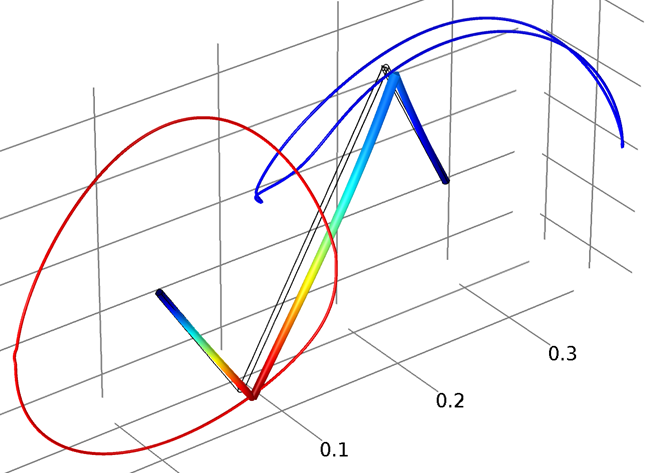
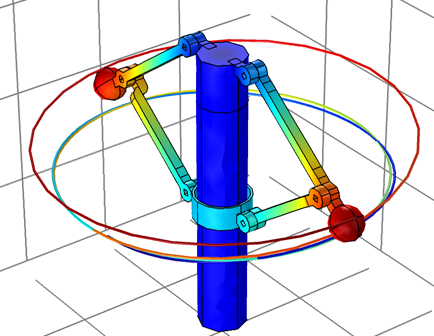 Example of the Point Trajectory Plot feature in a model of a centrifugal governor.
Example of the Point Trajectory Plot feature in a model of a centrifugal governor.
Example of the Point Trajectory Plot feature in a model of a centrifugal governor.
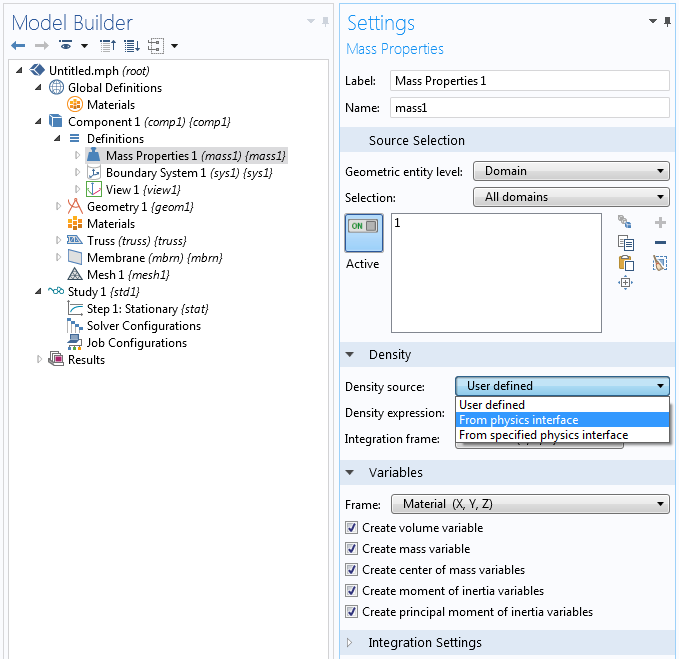
Computation of Mass Properties
The structural mechanics physics interfaces (Solid Mechanics, Membrane, Shell, Plate, Truss, Beam, and Multibody Dynamics) can now return complete mass properties to the Mass properties node under Definitions. All types of mass contributions from the physics interfaces are accounted for:
- Mass density in all material models.
- Added mass.
- Point mass and inertia.
- Mass and inertia on Rigid domains and Rigid connectors.
- Inertia with respect to thickness in beams and shells.
- Inertia with respect to rotation around the axis of a beam.
It is possible to also compute the mass properties in the deformed configuration by selecting Spatial frame in the settings for the Mass Properties subnode.
{kind=link}